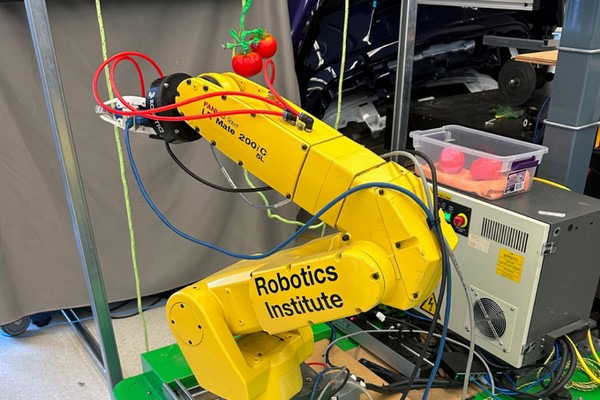
En el laboratorio del Dr. Medhat Moussa, de la Facultad de Ingeniería de la Universidad de Guelph, un robot de brazos amarillos se encuentra en una plataforma frente a un modelo de tomatera. Se inclina hacia el tomate cuando se pulsa el botón de inicio.
El robot examina la planta con cámaras integradas, inclinando la cabeza como si "pensara" con su algoritmo de visión artificial. Agarra el tomate con unas pinzas similares a dedos y deposita el producto perfectamente en un recipiente.
Esta última iteración del Sistema de Automatización Inteligente de Invernaderos de Guelph (GIGAS), un robot inteligente desarrollado en el Instituto de Robótica @ Guelph, cosecha tomates utilizando visión potenciada por IA y un sistema de agarre innovador. Se sirve del aprendizaje profundo y de una base de datos de imágenes para identificar el tomate entre obstáculos ambientales y para averiguar cómo agarrarlo de la mata.
La tecnología desarrollada por la Universidad de Gales fue presentada recientemente al primer ministro de Ontario, Doug Ford, y a la ministra de Colegios y Universidades de Ontario, Jill Dunlop, quienes escucharon cómo la capacidad de automatización de GIGAS podría ayudar en breve a paliar las difíciles condiciones de trabajo en los invernaderos y la escasez de mano de obra agraria.
La necesidad de tecnología agrícola avanzada es crítica. Un informe reciente del Consejo de Recursos Humanos Agrícolas de Canadá predice que un tercio de la mano de obra agraria se jubilará en 2030, lo que dejará más de 100.000 puestos de trabajo por cubrir.
Según el informe, la tecnología innovadora podría ser una solución crucial para hacer frente a esta escasez crónica de mano de obra, y la Universidad de Guelph está a la cabeza.
La Universidad de Guelph es líder en robótica inteligente
"Yo diría que la Universidad de Guelph está a la cabeza en robótica inteligente para invernaderos y recolección", afirma Moussa, director del proyecto. "Empezamos este proyecto en 2010. Ahora vamos por delante de otras universidades e incluso de la industria. Se trata de un problema muy complejo y es difícil encontrar un robot que se venda para esta aplicación".
El investigador asociado Cole Tarry, que lleva varios años trabajando en este proyecto, hace una demostración.
"Ningún otro laboratorio de investigación que conozcamos está trabajando en robótica para tomates beefsteak, que suelen ser los más difíciles de trabajar", añade Tarry. "Los robots más cercanos a la comercialización trabajan con tomates cherry o pepinos".
La tecnología que se está desarrollando en el laboratorio tiene otras aplicaciones. Podría entrenarse para cosechar otras hortalizas, como pimientos y pepinos, que son los otros dos grandes cultivos de Leamington, Ontario, donde este proyecto se inspiró por primera vez en los cultivadores, que instaron al desarrollo de soluciones automatizadas.
Para más información:
Universidad de Guelph
Email: media@uoguelph.ca